Elbow Exoskeleton for Tremor Suppression:
Using Realtime Tremor Frequency Estimation Feedback
Team: Parker Bassett, Sarvenaz Chaeibakhsh, James Tigue
Motivation: Parkinson's Disease patients suffer from essential tremor that impacts the desired motion. As part of Wearable Robotics Semester project we attempt to mitigate simulated Parkinson's essential tremor at the elbo using a wearable device.
Goals:
Background: •Rocon et al. have developed an upper arm exoskeleton to test various control strategies to reduce the amplitude of the tremors.
E. Rocon, J. M. Belda-Lois, A. F. Ruiz, M. Manto, J. C. Moreno and J. L. Pons, "Design and Validation of a Rehabilitation Robotic Exoskeleton for Tremor Assessment and Suppression," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 15, no. 3, pp. 367-378, Sept. 2007, doi: 10.1109/TNSRE.2007.903917.
Motivation: Parkinson's Disease patients suffer from essential tremor that impacts the desired motion. As part of Wearable Robotics Semester project we attempt to mitigate simulated Parkinson's essential tremor at the elbo using a wearable device.
Goals:
- Reduce Tremor motions
- Allow voluntary motion
Background: •Rocon et al. have developed an upper arm exoskeleton to test various control strategies to reduce the amplitude of the tremors.
E. Rocon, J. M. Belda-Lois, A. F. Ruiz, M. Manto, J. C. Moreno and J. L. Pons, "Design and Validation of a Rehabilitation Robotic Exoskeleton for Tremor Assessment and Suppression," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 15, no. 3, pp. 367-378, Sept. 2007, doi: 10.1109/TNSRE.2007.903917.
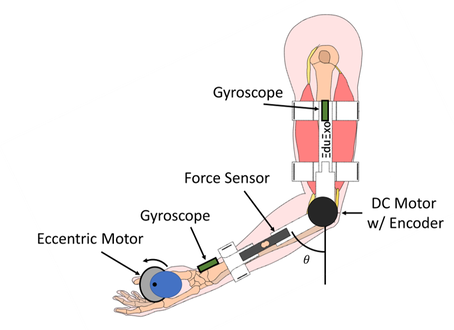
Hardware
|
Exoskeleton
|
|
Controller
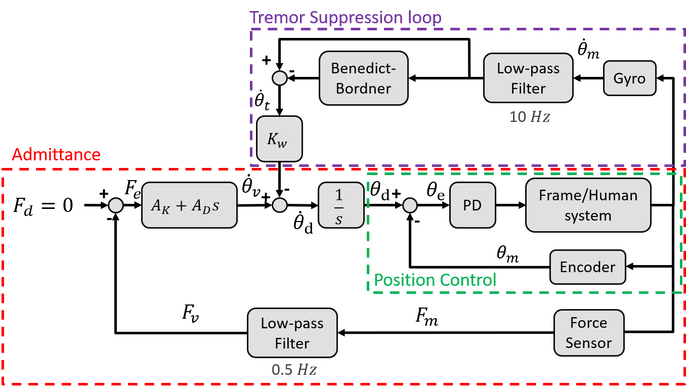
Position Controller: A stiff PD servo controller was developed to control motor position.
Admittance Controller: A controller was developed to allow voluntary motion that occures at lower frequencies utilizing an admittance frame work.
Tremor Suppression: A Benedict-Bordner state estimator is used to estimate the tremor frequencies and actively keep the exo from moving at those frequecies.
Admittance Controller: A controller was developed to allow voluntary motion that occures at lower frequencies utilizing an admittance frame work.
Tremor Suppression: A Benedict-Bordner state estimator is used to estimate the tremor frequencies and actively keep the exo from moving at those frequecies.
Experimental Results
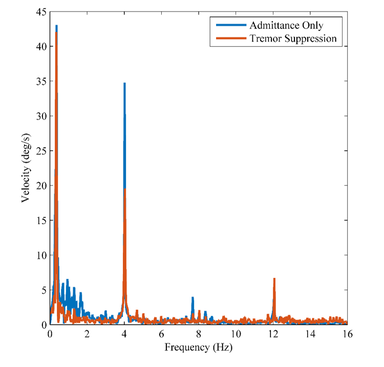
Static Tremor Suppression: The tremor supression was tested as the human subject holds an eccentric motor spinning at 4 Hz (lower end of tremor frequencies) and trying to hold a flexed joint position. Tremor suppression with the limited hardware did show some reduction of tremor magnitude.
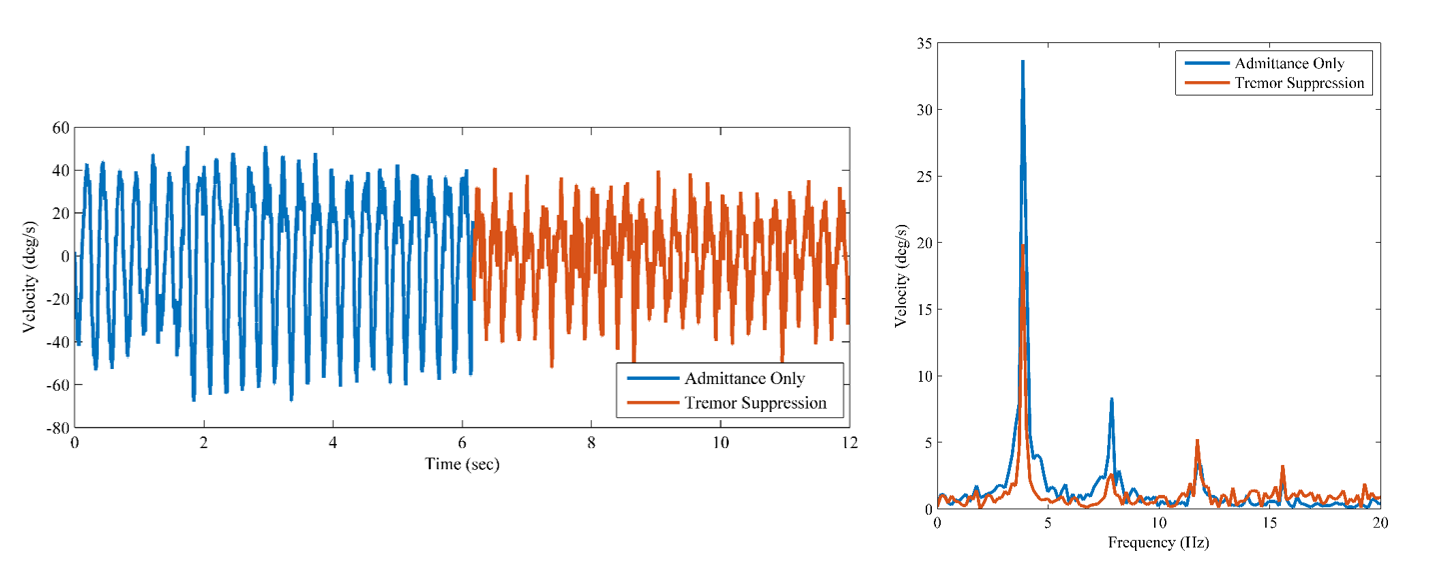
Dynamic Results: As the human subject moves there elbow at low frequencies (1-2 Hz) the tremor suppression was able to reduce the tremor frequencies and allow voluntary frequencies.
Limitations and Leasons Learned
Hardware is a huge limitation in this work. The hardware used was an educational exoskeleton with hobby motors and controllers. Because of this the actuator limitations limited the performance. The controller is also limited by the tremor estimation method. It was only tested on a constant tremor frequency and not a variable one. This work showed a proof of concept for tremor suppression and was a way to apply wearable robotics concepts to a real world problem.
