Series Elastic Actuator (SEA) for Ankle Exoskeleton:
Design, Simulation, and Control
As part of a Wearable Robotics course at the University of Utah, taught by Dr. Tommaso Lenzi, a continuous class project was conducted to design and simulate an ankle exoskeleton utilizing a series elastic actuator (SEA). All details are not disclosed to respect the continuation of the course and future learning. If you have interest in this work please contact me.
SEA Dynamic Model and Design
The first goal of this work was to develop a dynamic simulation framework for designing a series elastic actuator for an ankle exoskeleton to minimize energy consumption. Specifically, this page will discuss the methods for modeling the effects of transmission ration and elastic element stiffness on energy consumption while also considering the limitations of the actuator and supplied power. The base motor for this work was the Maxon EC-4pole 30 motor.
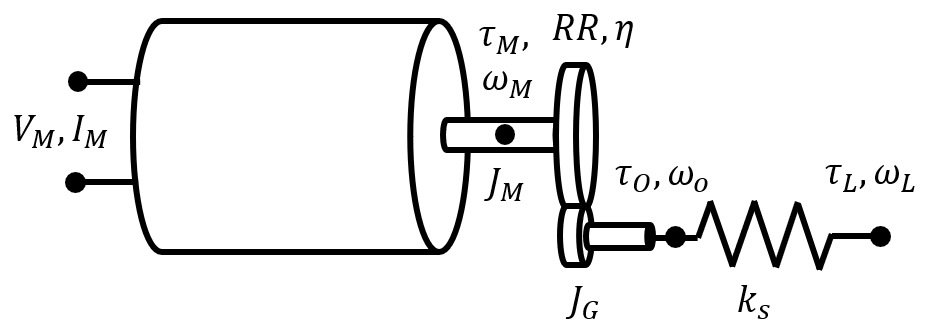
In this work, we are assuming we have a desired ankle torque, TL, and speed, WL, load profiles. The first goal is to determine the motor torque, TM, and speed, WM, requirements for the motor depending on the transmission ratio, RR, and series spring stiffness. where JM is the inertia of the motor, JG is the inertia of the gear box transmission, and eta is the efficiency of the gear box.
Using the motor specs provided on the Maxon data sheet, simulations were conducted to see the effects of spring stiffness and transmission ratio on the motor performance. The human was modeled as 70 kg body mass and a stride duration of 1.2 seconds. The transmission system was also assumed to be a harmonic drive with an efficiency of 90%.
In this work, we are assuming we have a desired ankle torque, TL, and speed, WL, load profiles. The first goal is to determine the motor torque, TM, and speed, WM, requirements for the motor depending on the transmission ratio, RR, and series spring stiffness. where JM is the inertia of the motor, JG is the inertia of the gear box transmission, and eta is the efficiency of the gear box.
Using the motor specs provided on the Maxon data sheet, simulations were conducted to see the effects of spring stiffness and transmission ratio on the motor performance. The human was modeled as 70 kg body mass and a stride duration of 1.2 seconds. The transmission system was also assumed to be a harmonic drive with an efficiency of 90%.
Parametery Design Transmission Ratio and Spring Stiffness
Using the motor specs provided on the Maxon data sheet, simulations were conducted to see the effects of spring stiffness and transmission ratio on the motor performance. The human was modeled as 70 kg body mass and a stride duration of 1.2 seconds. The transmission system was also assumed to be a harmonic drive with an efficiency of 90%
Using the motor specs provided on the Maxon data sheet, simulations were conducted to see the effects of spring stiffness and transmission ratio on the motor performance. The human was modeled as 70 kg body mass and a stride duration of 1.2 seconds. The transmission system was also assumed to be a harmonic drive with an efficiency of 90%
|
Speed Requirements
Transmission ratio and spring stiffness directly effect the required motor velocity. Figure 2 shows the result of changing spring stiffness and transmission ratio. 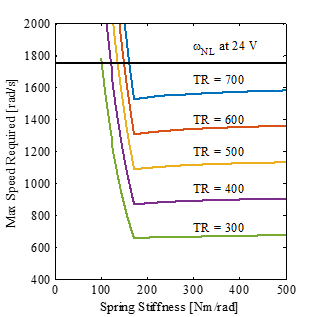
|
Energy Consumption
When comparing the effect of transmission ratio and spring stiffness on the energy consumption of the series elastic actuator both the regeneration and no-regeneration cases were considered. 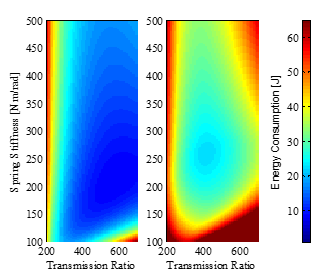
|
Thermal Analysis
To ensure series elastic actuator system will be viable for long term use a thermal analysis was conducted. The motor temperature as a function of time and RMS current was estimated. 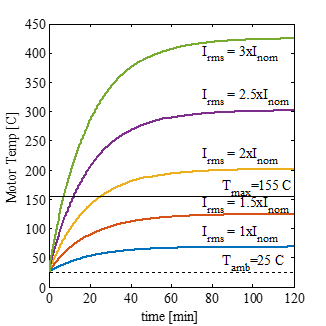
|
SEA Control using a Disturbance Observer
The second goal of this work is to develop a torque controller for an ankle exoskeleton using a series elastic actuator (SEA). Specifically, the controller’s goal is to provide accurate torque control while minimizing impedance to the user. A simulated torque controller was developed, characterized, and simulated for ankle torque assistance.
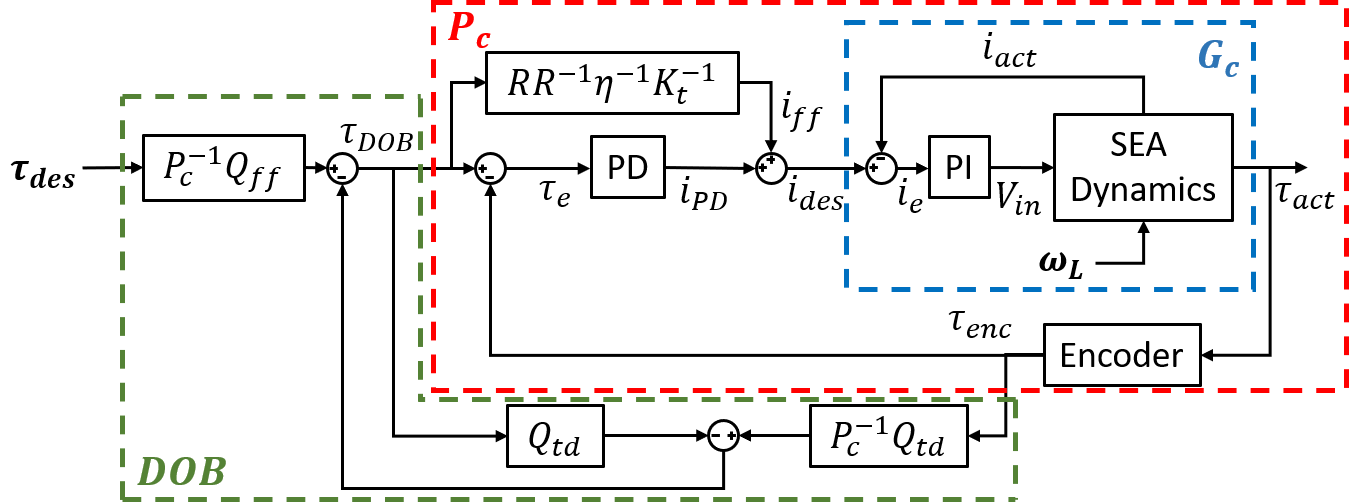
The work described here follows the development of the controller described in Paine et al. The description of the controller will be broken into three parts: low level current controller, outer loop force control with feedforward, and disturbance observer.
The work described here follows the development of the controller described in Paine et al. The description of the controller will be broken into three parts: low level current controller, outer loop force control with feedforward, and disturbance observer.
Low Level Current Control
A current feedback PI controller was designed to simulation the dynamics of a current controller.
A current feedback PI controller was designed to simulation the dynamics of a current controller.
Torque Control
The torque controller has two parts: (1) a feedforward component to account for reduction ratio, gear efficiancy, and torque constant. (2) a feedback torque sensing using the elastic force sensing of the series elastic element.
The torque controller has two parts: (1) a feedforward component to account for reduction ratio, gear efficiancy, and torque constant. (2) a feedback torque sensing using the elastic force sensing of the series elastic element.
Disturbance Observer
A disturbance observer was developed to increase the torque tracking band width of the controller and reduce the impedance of the controller on the human ankle. This was developed by estimating the model of the current and torque controllers as Pc, and utilizing 2nd order filters Qtd and Qff.
A disturbance observer was developed to increase the torque tracking band width of the controller and reduce the impedance of the controller on the human ankle. This was developed by estimating the model of the current and torque controllers as Pc, and utilizing 2nd order filters Qtd and Qff.
|
Torque Tracking
To evaluate the controllers ability to track a desired torque the frequency response of the controller was found. The magnitude, phase, and tracking error were calculated for the controller with and without the disturbance observer. |
Controller Impedance
Since the system is going to be used in an assistive ankle exoskeleton, minimal impedance of the exoskeleton on the human’s motion is desired. The torque response of the system to the users input velocity was characterized by setting the desired torque to zero and by setting the velocity of the load, , to a series of sinusoid inputs. 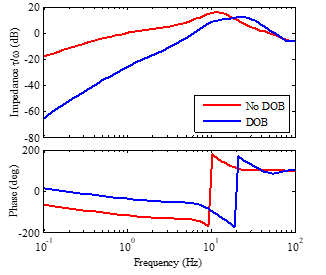
|
Ankle Exoskeleton Trajectory
To further evaluate the controller for exoskeleton use, a simulated ankle torque cycle was reproduced by both controllers. Using the Winter’s data provided, 5 cycles of 50% torque assistance were simulated with full human gait velocities enforced on the system. 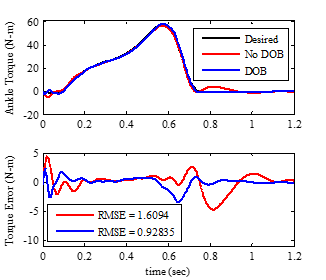
|
N. Paine, S. Oh and L. Sentis, "Design and Control Considerations for High-Performance Series Elastic Actuators," in IEEE/ASME Transactions on Mechatronics, vol. 19, no. 3, pp. 1080-1091, June 2014, doi: 10.1109/TMECH.2013.2270435.
