Inverted Pendulum
Overview
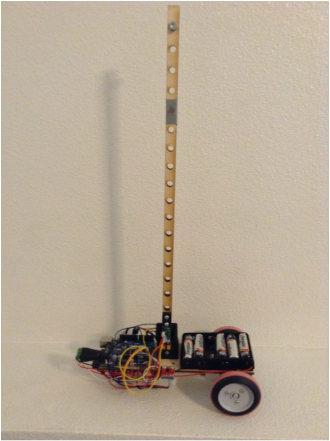
As a part of a control systems course at the University of Idaho, I was tasked with many different projects related to building an inverted pendulum cart. These projects included system modeling and simulation, observer design, and controller design. This project was a full semester project. the details shown are the final aspects of the project. There were intermediate tasks related to building and testing the cart not shown.
System Modeling
As a part of a control systems course at the University of Idaho, I was tasked with many different projects related to building an inverted pendulum cart. These projects included system modeling and simulation, observer design, and controller design. This project was a full semester project. the details shown are the final aspects of the project. There were intermediate tasks related to building and testing the cart not shown.
System Modeling
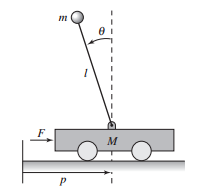
The goal of this section of the project was to develop a system model for the cart and pendulum. A 4-state model was developed for cart position and pendulum angle.
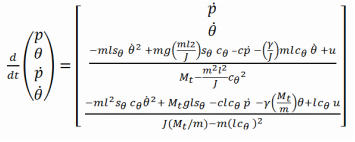
Nonlinear Model
Nonlinear Model
Linear Model
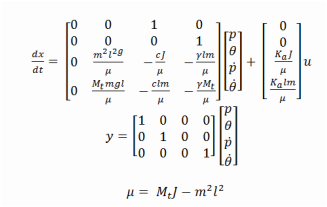
System identification techniques were used to determine the cart and pendulum damping, pendulum inertia, and Arduino system gain.
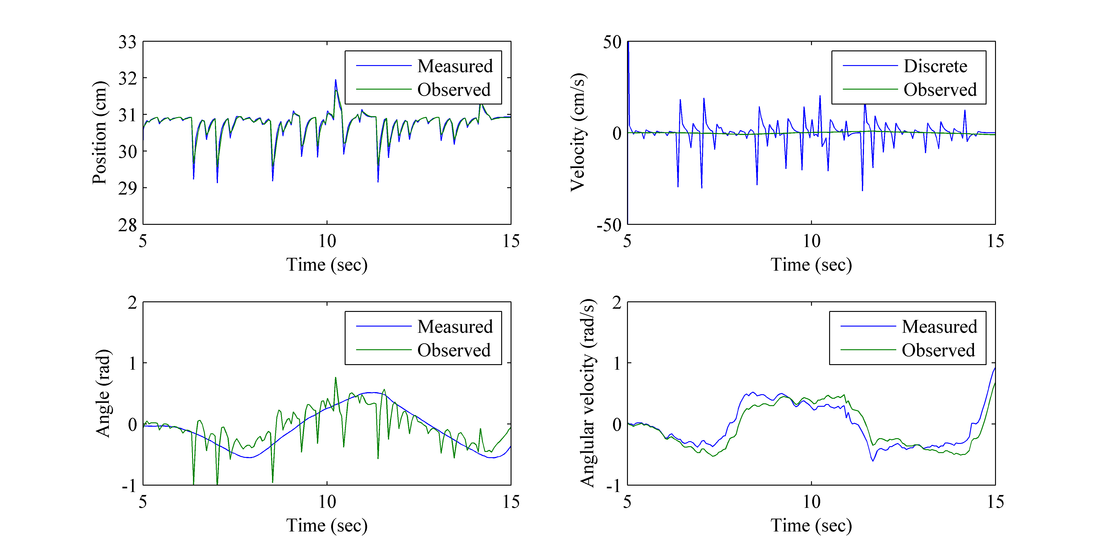
Observer Design
A four state observer was designed for the pendulum cart system.
A four state observer was designed for the pendulum cart system.
Controller Design
P controller with feed forward term.
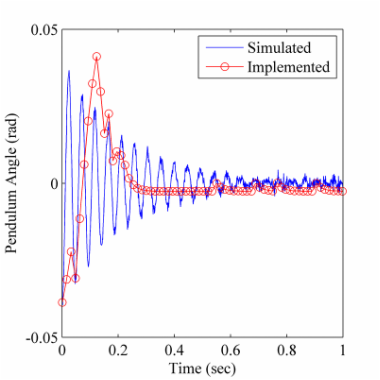
Nonlinear effects of the implemented cart show very different results from the simulated linear system. These effects are primarily dominated by static friction in both the pendulum and the cart, as well as the gear backlash in the drive train.
Stablization
