Robotic hand
Overview
This project was inspired by my love for robots. The idea of humanoid robots is an amazing feat that much current research is dedicated to. The goal of this project was to develop a robotic hand that can be controlled by a human hand. A control glove is implemented to be the input control for the robotic hand.
Prototype I

The first prototype was developed prove the concept of the design. A simple cardboard frame was used as the main structure of the hand. Electrical tubing acts as the fingers. Each finger is controlled by a servo motor pulling a string. As the servo pulls the string the fingers curls. The control glove used flexible resistor strain gauges as input. The input signal is processed by an Arduino that controls the servo motors.
Issues: weak hand, limited finger movement, and too much frame deflection.
Issues: weak hand, limited finger movement, and too much frame deflection.
Prototype II

The second prototype was designed to improve the finger and hand design. The same electronics and controls were used. This hand utilized a different finger construction and a different gripping geometry. This design was much sturdier and had slightly longer finger travel. If all fingers were actuated at the same time the Arduino will surge and reset itself. If cannot provide enough power for all five fingers.
Issues: weak grip, short finger travel, power issue, and still to much deflection.
Issues: weak grip, short finger travel, power issue, and still to much deflection.
Prototype III
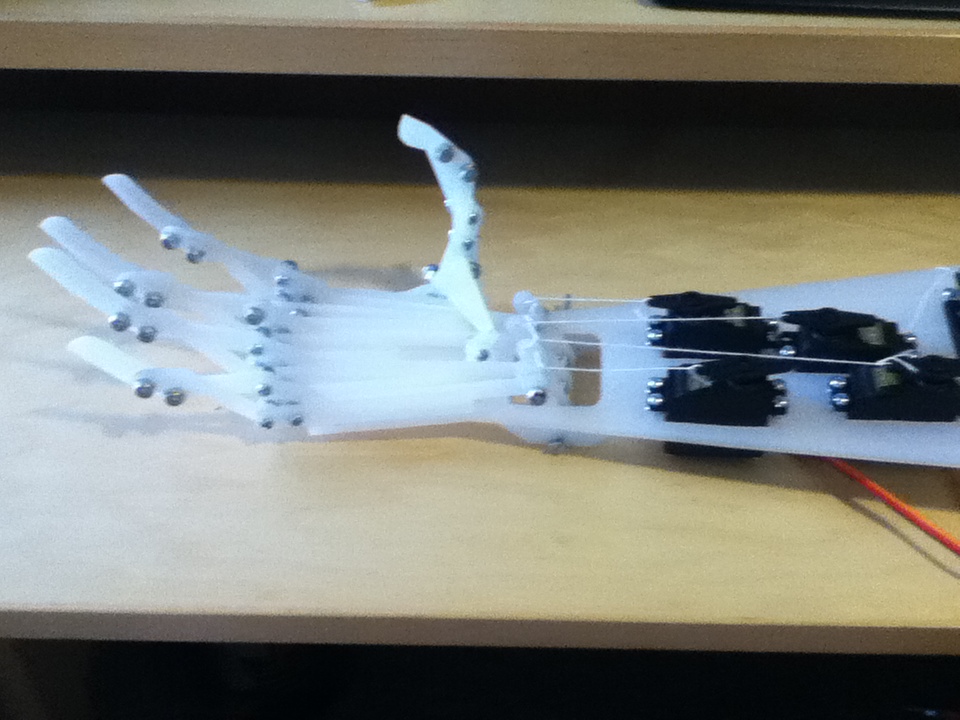
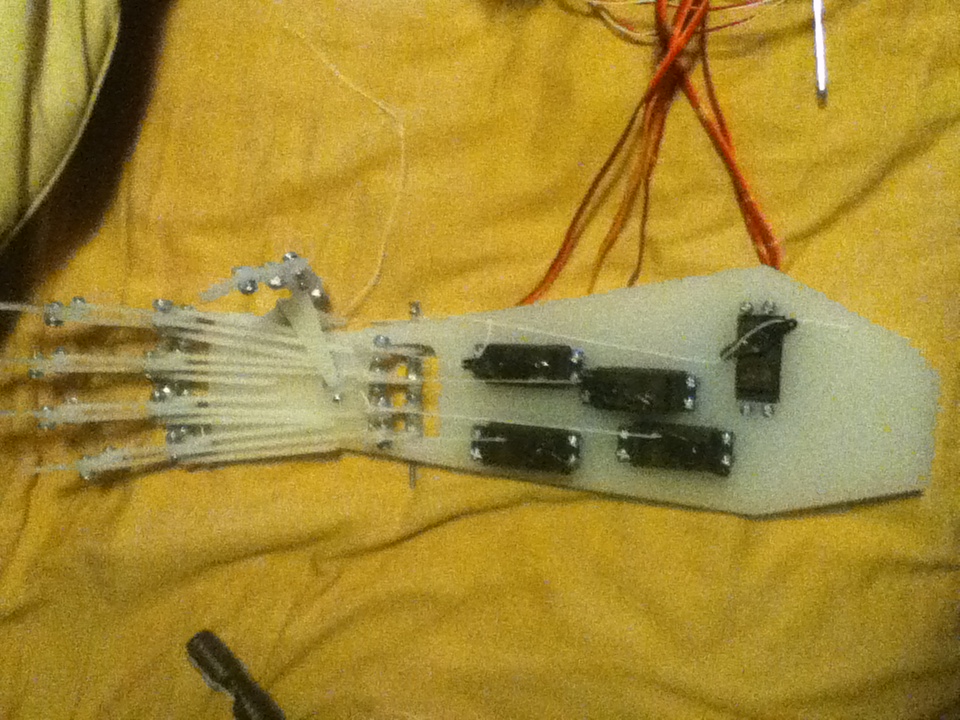
The third prototype is a large improvement on the previous designs. This design has a new body made of acrylic, new stronger/larger servos, and a power distribution driver. This prototype has a portable power supply and can be ran without a laptop plug in.
The finger system is a linkage system with 1 DOF. The new finger has a larger range of motion and has better gripping capabilities. Each finger was constructed using 4 linkages made of acrylic
The finger system is a linkage system with 1 DOF. The new finger has a larger range of motion and has better gripping capabilities. Each finger was constructed using 4 linkages made of acrylic
|
|
