NASA Tensegrity SuperBall Payload
Overview
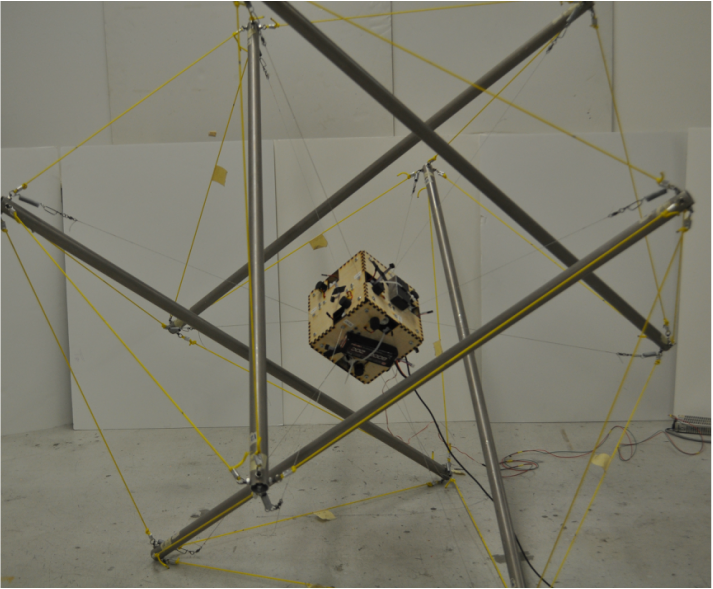
As part of the University of Idaho's capstone experience, my senior design project is to develop an actuated internal payload for the NASA Tensegrity robot, Super Ball Bot. The goal is to provide a locomotion options for the tensegrity robot over the course of the 2014-2015 school year. The above picture depicts the current design for the payload.
Tensegrity
As part of the University of Idaho's capstone experience, my senior design project is to develop an actuated internal payload for the NASA Tensegrity robot, Super Ball Bot. The goal is to provide a locomotion options for the tensegrity robot over the course of the 2014-2015 school year. The above picture depicts the current design for the payload.
Tensegrity
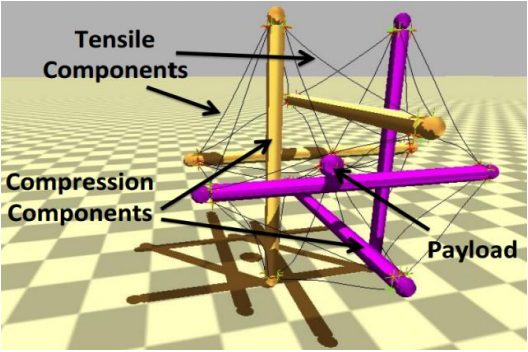
Tensegrity is a new term meaning "integrity through tension." This mean that all members of the structure are in pure tension or pure compression. This removes the need to support bending loads. Structures of these kinds have a high strength to weight ratio. The goal of this tensegrity robot is to develop a concept space exploration device. The following links will provide more detail on the subject.
http://ti.arc.nasa.gov/tech/asr/intelligent-robotics/tensegrity/superballbot/
http://www.magicalrobot.org/BeingHuman/category/tensegrity-2
http://ti.arc.nasa.gov/tech/asr/intelligent-robotics/tensegrity/superballbot/
http://www.magicalrobot.org/BeingHuman/category/tensegrity-2
Collaborators
Client: NASA, Vytas SunSpiral
Mentors: Kyle Morse, MS
Stephen Goodwin, MS
Team Members:
Client: NASA, Vytas SunSpiral
Mentors: Kyle Morse, MS
Stephen Goodwin, MS
Team Members:

Amy Wolschlegel (CompE), Kelsey Rayborn (ME), James Tigue (ME), Mark Garber (ME), Dylan Waterman (EE)
Current Design
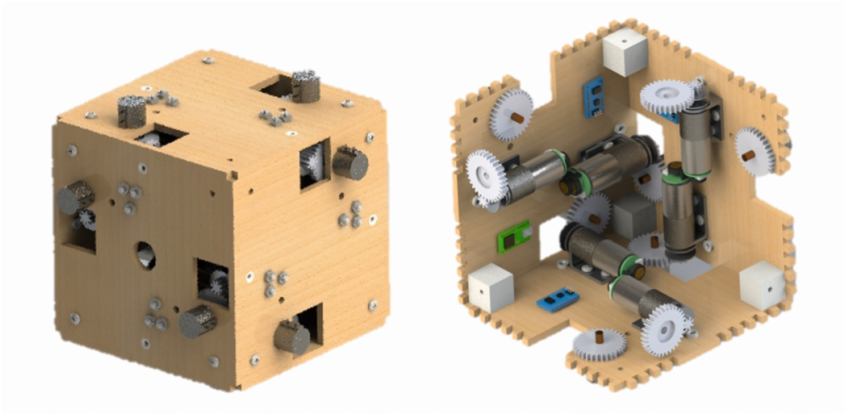
Our current design incorporates 12 brushed DC motors. As they turn they spool in cables to appropriate lengths. Position is measured with a geared 10-turn potentiometer setup. This provides an absolute position that only need re-calibrated when put together. A puzzle piece wood frame houses motors, controllers, gears, and wiring.
Our current design incorporates 12 brushed DC motors. As they turn they spool in cables to appropriate lengths. Position is measured with a geared 10-turn potentiometer setup. This provides an absolute position that only need re-calibrated when put together. A puzzle piece wood frame houses motors, controllers, gears, and wiring.
Controller Design
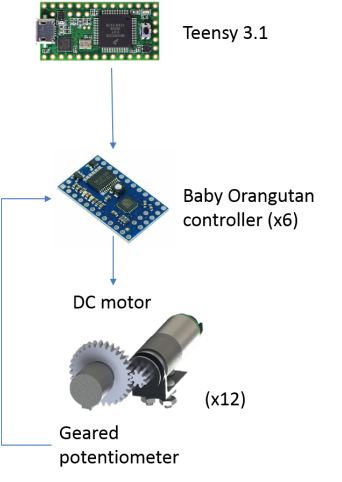
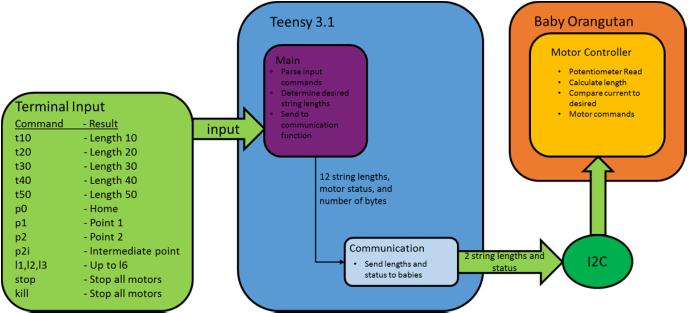
The system is controlled by a master Teensy 3.1 Arduino compatible micro-controller. This controller talks to 6 Pololu Baby Orangutan controllers via I2C. Each Baby Orangutan act as the motor controller and position sensor for two motors.
The system is controlled by a master Teensy 3.1 Arduino compatible micro-controller. This controller talks to 6 Pololu Baby Orangutan controllers via I2C. Each Baby Orangutan act as the motor controller and position sensor for two motors.
Control Scheme
Fully Assembled